Prothesenelemente
Fußteile
- Klasse 0-1:
- SACH(Solid Ankle Cushioned Heel)-Fuß: leichter Fuß mit elastischem Fersenkeil
- Greissinger- und Normgelenk-Fuß mit beweglichem Knöchelgelenk, auch als GeriatrieVersion in Leichtbauweise
- Klasse 2-3:
- Dynamikfuß: elastischer Fersenkeil und Mittelfußkeil
- Endolite-Multiflex-Fuß: Blattfeder
- Klasse 3-4:
- Feder im Fuß spannt sich in der Standphase und fördert den Push-off des Fußes
- Reiner Sportfuß, z. B. C-Sprint aus Carbon-Feder
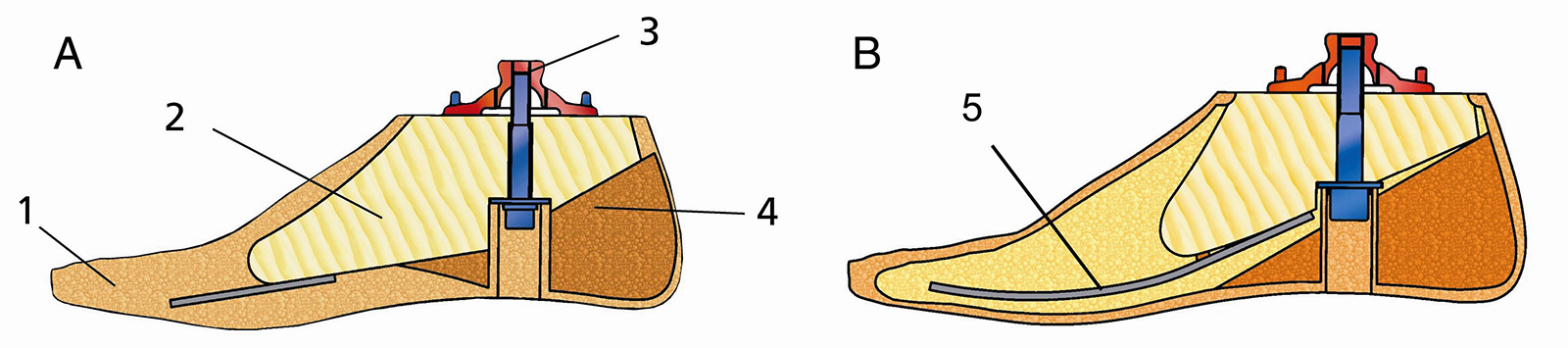
Abb. 10-11: A zeigt einen Solid Ankle Cushion Heel Fuß: 1=Fußformteil, 2=Holzkern, 3=Adapter, 4=Fersenkeil, 5=Vorfußfeder. B zeigt einen Dynamikfuß, der über eine ausgeprägte Vorfußfeder den Push off optimiert (mit freundlicher Genehmigung der Otto Bock Health Care GmbH)
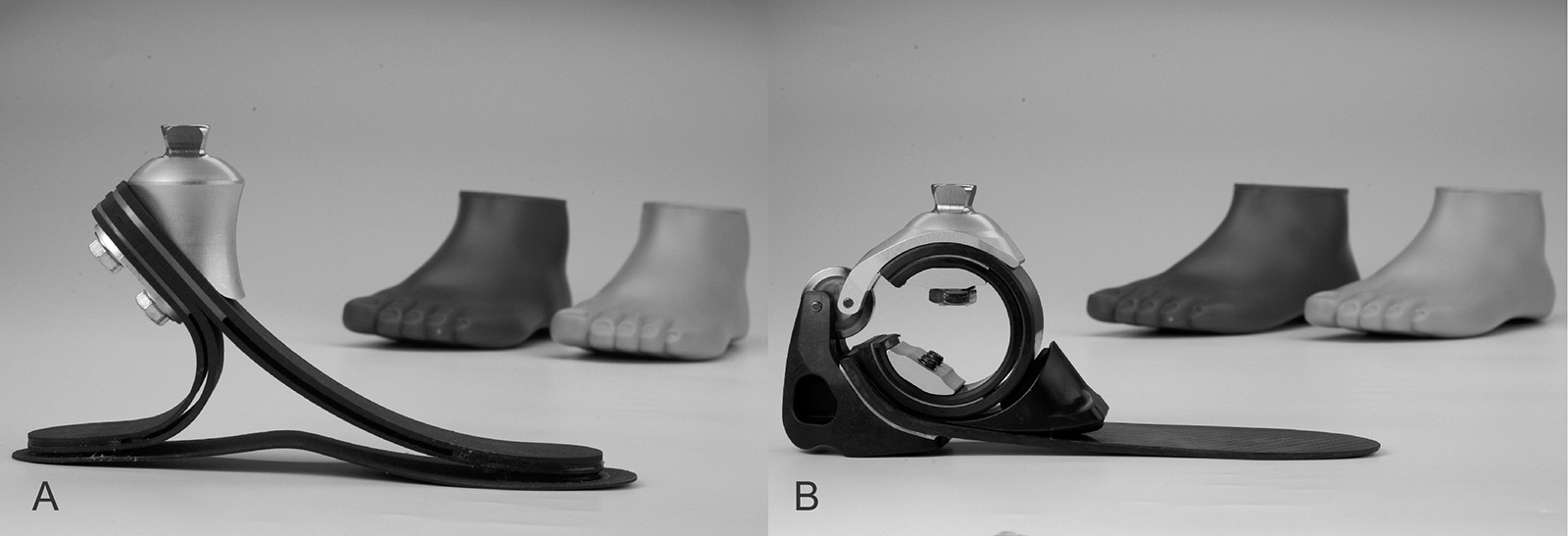
Abb. 10-12: Trias Fußteil (A): bei Fersenbelastung erfolgt die Dämpfung des Stoßes und außerdem unterstützt die Karbonfeder die Plantarflexion. Nach der Fersenbelastung geben die komprimierten Federn die gespeicherte Energie wieder ab und helfen bei der Vorwärtsbewegung. C-Walk (1c40): neue Generation des Karbonfederfußes in dem eine C-Feder und die Basisfeder mit einem Steuerring dynamisch gekoppelt sind. In jeder Phase wird soviel der gespeicherten Energie freigesetzt, wie sie auch tatsächlich für den dynamischen Abrollvorgang notwendig ist (Mit freundlicher Genehmigung der Otto Bock Health Care)
Kniegelenke:
- Einteilung:
- Achsen: Monozentrik und Polyzentrik
- Standphasensicherung: über den Aufbau (Lage des Kniedrehpunktes), mechanisch (Sperre oder lastabhängige Bremse) oder fluidisch (Hydraulik)
- Schwungphasensteuerung: mechanische Systeme (z.B. Federvorbringer, konstante oder intermittierende Bremse), Fluidsysteme (Pneumatik für niedrigere Ganggeschwindigkeiten, Hydraulik für höhere Ganggeschwindigkeiten), elektronisch kontrollierte Hydraulik
- elektronisch kontrollierte Standphasensicherung und Schwungphasensteuerung (z.B. C-Leg von Otto Bock oder Rheo-Knee von Össur)
Hüftgelenke:
- Gelenk zur Anbindung des Beckenkorbs an ein Rohrskelett (Modularbauweise) notwendig
- die meisten Systeme verfügen über einen Streckmechanismus, der über eine Feder gesteuert wird und die Vorbringung über Flexion der LWS unterstützt

Abb. 10-13: SR90 (A) und SR92 Modular Bremskniegelenke (B): Schwungphasensteuerung mit mechanischem Vorbringer (SR90) oder progressiver Doppelkammer-Pneumatik (SR92). Der Bremsmechanismus schaltet bei Vorfußlast automatisch ab. Modular Kniegelenk SR106 (C): Pneumatik zur Verbesserung der Schwungphase. EBS (D) Knieglenk ermöglicht bei Fersenauftritt eine kontrollierte Kniebeugung von max. 15 Grad und verbessert so die Kniesicherheit und Funktion. SR95 Modulargelenk (E): Miniaturhydraulik erzeugt dynamische Bewegungswiderstände und optimiert das Gangbild. (Mit freundlicher Genehmigung der Otto Bock HealthCare GmbH)

Abb. 10-14: Beinprothesen der Firma Otto Bock Health Care GmbH

Abb. 10-15: Das C-Leg verfügt über eine mikroprozessorgesteuerte Steuerung der Stand- und Schwungphase. Es mißt 50 Mal in der Sekunde (50 Hz) die auf das Kniegelenk einwirkenden Biegemomente. Der Mikroprozessor steuert dann in Echtzeit individuell die Bewegungswiderstände. Die so mögliche Beugung unter Last (Yielding) erlaubt alternierendes Treppabsteigen. Die Einstellung erfolgt individuell durch eine spezielle Software. (Aktivitätsstufe: 3-4) (mit freundlicher Genehmigung der Otto Bock HaelthCare Deutschland GmbH)